Références
Le module bhaptics_python fournit des fonctions pour contrôler les appareils haptiques bHaptics depuis Python. Il vous permet de lire des motifs haptiques, de contrôler directement les moteurs des appareils et de gérer la lecture haptique.
import bhaptics_python
Lecture haptique basée sur les événements
Lit les motifs haptiques associés à des événements spécifiques (conçus dans bHaptics Designer/Portal). Ces fonctions sont recommandées pour la plupart des applications.
play_event
async def bhaptics_python.play_event(event_name: str) -> int
async def bhaptics_python.play_event(event_name: str, device_index: int) -> int
Lit l'événement haptique prédéfini.
- La lecture des événements affecte les appareils haptiques dont l'index est la valeur par défaut (
-1). Utilisez simplement le premier paramètre — le nom de l'événement — uniquement. Cela peut être utilisé à des fins générales. - Si vous souhaitez activer un appareil haptique spécifique, vous pouvez également utiliser le deuxième paramètre — l'index de l'appareil. Vous pouvez vérifier ou définir l'index de l'appareil dans bHaptics Player.
Paramètres
event_name: Nom de l'événement haptique.device_index(optionnel) : Index de l'appareil haptique.
Valeur de retour
ID de la requête. Vous pouvez l'utiliser pour arrêter la lecture. Retourne -1 en cas d'échec.
Exemple
import bhaptics_python
async def play_example():
request_id = await bhaptics_python.play_event("heartbeat")
print(f"Playback request ID: {request_id}")
play_param
async def bhaptics_python.play_param(
event_name: str,
intensity: float,
duration: float,
x_offset: float,
y_offset: float
) -> int
async def bhaptics_python.play_param(
event_name: str,
intensity: float,
duration: float,
x_offset: float,
y_offset: float,
device_index: int
) -> int
Lit l'événement haptique en ajustant l'Intensity, la Duration et la direction du retour haptique.
Paramètres
event_name: Nom de l'événement haptique.intensity: Multiplicateur d'Intensity haptique. Plage valide : [0.0-2.0] (Défaut :1.0)duration: Multiplicateur de Duration. (Défaut :1.0)x_offset: Fait pivoter le retour haptique dans le sens antihoraire. Plage valide : [0.0-360.0] (Défaut :0.0)y_offset: Déplace le retour haptique vers le haut ou vers le bas. Plage valide : [-0.5-0.5] (Défaut :0.0)device_index(optionnel) : Index de l'appareil haptique.
Valeur de retour
ID de la requête. Vous pouvez l'utiliser pour arrêter la lecture. Retourne -1 en cas d'échec.
Exemple
import bhaptics_python
async def play_params_example():
request_id = await bhaptics_python.play_param(
"pistol_r", 1.0, 1.0, 0.0, 0.0, 0
)
play_loop
async def play_loop(
event_name: str,
intensity: float,
duration: float,
x_offset: float,
y_offset: float,
interval: int,
max_count: int
) -> int
async def play_loop(
event_name: str,
intensity: float,
duration: float,
x_offset: float,
y_offset: float,
interval: int,
max_count: int,
device_index: int
) -> int
Lit les événements haptiques en boucle.
Paramètres
event_name: Nom de l'événement haptique.intensity: Multiplicateur d'Intensity haptique. Plage valide : [0.0-2.0] (Défaut :1.0)duration: Multiplicateur de Duration. (Défaut :1.0)x_offset: Fait pivoter le retour haptique dans le sens antihoraire. Plage valide : [0.0-360.0] (Défaut :0.0)y_offset: Déplace le retour haptique vers le haut ou vers le bas. Plage valide : [-0.5-0.5] (Défaut :0.0)interval: Intervalle de temps entre les boucles, en millisecondes.max_count: Nombre de boucles.device_index(optionnel) : Index de l'appareil haptique.
Valeur de retour
ID de la requête. Vous pouvez l'utiliser pour arrêter la lecture. Retourne -1 en cas d'échec.
Exemple
import bhaptics_python
async def play_loop_example():
result = await bhaptics_python.play_loop(
"heartbeat", 0.8, 1000, 90, 0, 150, 5
)
play_without_result
async def bhaptics_python.play_without_result(
event_name: str,
intensity: float,
duration: float,
x_offset: float,
y_offset: float
)
async def bhaptics_python.play_without_result(
event_name: str,
intensity: float,
duration: float,
x_offset: float,
y_offset: float,
device_index: int
)
Lit les événements haptiques sans attendre de résultat (fire-and-forget).
Paramètres
event_name: Nom de l'événement haptique.intensity: Multiplicateur d'Intensity haptique. Plage valide : [0.0-2.0] (Défaut :1.0)duration: Multiplicateur de Duration. (Défaut :1.0)x_offset: Fait pivoter le retour haptique dans le sens antihoraire. Plage valide : [0.0-360.0] (Défaut :0.0)y_offset: Déplace le retour haptique vers le haut ou vers le bas. Plage valide : [-0.5-0.5] (Défaut :0.0)device_index(optionnel) : Index de l'appareil haptique.
Exemple
import bhaptics_python
async def play_without_result_example():
await bhaptics_python.play_without_result(
"heartbeat", 0.8, 1.0, 90, 0.25
)
Lecture haptique directe
Si vous souhaitez lire des retours haptiques sans événements, utilisez ces fonctions.
play_dot
async def bhaptics_python.play_dot(
position: int,
duration_millis: int,
values: list[int]
) -> int
async def bhaptics_python.play_dot(
position: int,
duration_millis: int,
values: list[int],
device_index: int
) -> int
Lit le retour haptique sur un actionneur haptique spécifique.
Paramètres
position: Type d'appareil haptique pour la lecture.Valeur Appareil 0TactSuit Pro 1TactSleeve(Left) 2TactSleeve(Right) 3TactVisor 4Tactosy for Hands(Left) 5Tactosy for Hands(Right) 6Tactosy for Feet(Left) 7Tactosy for Feet(Right) 8TactGlove(Left) 9TactGlove(Right) duration_millis: La Duration du retour haptique, mesurée en millisecondes. Une valeur supérieure ou égale à100est recommandée.values: Définissez la longueur de la liste selon le nombre de moteurs de l'appareil. Les valeurs de la liste représentent l'Intensity des moteurs. Plage valide pour chaque valeur de la liste : [0-100]device_index(optionnel) : Index de l'appareil haptique.
Exemple
import bhaptics_python
async def play_dot_example():
# Sequentially activate 32 motors
motor_len = 32
values = [0 for _ in range(motor_len)]
for i in range(motor_len):
values[i] = 50
if i > 0:
values[i - 1] = 0
request_id = await bhaptics_python.play_dot(0, 500, values)
time.sleep(0.5)
play_path
async def bhaptics_python.play_path(
position: int,
duration_millis: int,
x: list[float],
y: list[float],
intensity: list[int]
) -> int
async def bhaptics_python.play_path(
position: int,
duration_millis: int,
x: list[float],
y: list[float],
intensity: list[int],
device_index: int
) -> int
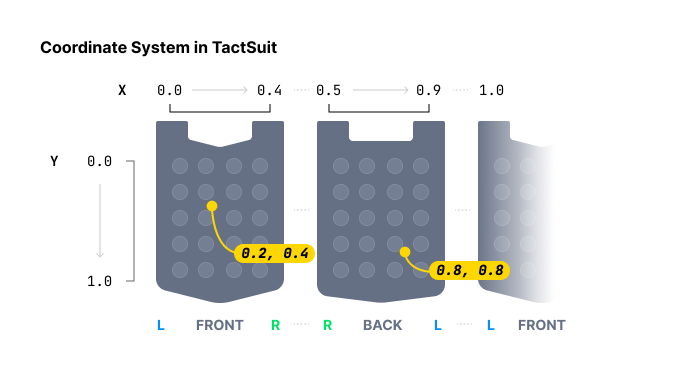
Lit le retour haptique autour de coordonnées spécifiques. Contrairement à la fonction play_dot qui spécifie l'Intensity haptique pour chaque actionneur individuellement, cette méthode spécifie l'Intensity haptique pour des coordonnées particulières.
Lors de la spécification de la position haptique, play_dot offre un contrôle discret, tandis que play_path est plus continu. play_dot attribue l'Intensity à des actionneurs individuels, tandis que play_path permet de spécifier l'Intensity pour des coordonnées spécifiques (entre 0 et 1 pour les axes X et Y), entraînant la vibration des actionneurs à proximité en conséquence.
Vous pouvez spécifier plusieurs coordonnées avec plusieurs intensités. Notez que tous les actionneurs autour de ces coordonnées dans la liste s'activeront simultanément (en même temps), et non séquentiellement. De plus, la taille de toutes les listes doit être identique.
En appelant continuellement cette fonction tout en modifiant progressivement les valeurs, vous pouvez obtenir l'effet d'un point haptique en mouvement.
Paramètres
position: Type d'appareil haptique pour la lecture. Pour plus d'informations, veuillez consulter ici.Valeur Appareil Nombre de moteurs 0TactSuit Pro 32 1TactSleeve(Left) 3 2TactSleeve(Right) 3 3TactVisor 4 4Tactosy for Hands(Left) 3 5Tactosy for Hands(Right) 3 6Tactosy for Feet(Left) 3 7Tactosy for Feet(Right) 3 8TactGlove(Left) 8 9TactGlove(Right) 8 duration_millis: La Duration du retour haptique, mesurée en millisecondes. Une valeur supérieure ou égale à100est recommandée.x: Liste des coordonnées X pour l'effet haptique. Chaque valeur doit être dans la plage : [0.0-1.0]y: Liste des coordonnées Y pour l'effet haptique. Chaque valeur doit être dans la plage : [0.0-1.0]intensity: Liste des valeurs d'Intensity pour chaque coordonnée. La longueur doit correspondre au nombre de coordonnées. Chaque valeur doit être dans la plage : [0-100]device_index(optionnel) : Index de l'appareil haptique.
Exemple
import bhaptics_python
import time
async def play_path_example():
# Path of point #1
x1 = [0.738, 0.723, 0.709, 0.696, 0.682, 0.667, 0.653]
y1 = [0.680, 0.715, 0.749, 0.782, 0.816, 0.852, 0.885]
intensity1 = [20] * len(x1)
# Path of point #2
x2 = [0.061, 0.072, 0.102, 0.184, 0.254, 0.310, 0.363]
y2 = [0.632, 0.587, 0.542, 0.498, 0.411, 0.366, 0.301]
intensity2 = [60] * len(x2)
for i in range(len(x1)):
# Point #1 and #2 will vibrate at the same time.
await bhaptics_python.play_path(0, 250, [x1[i], x2[i]], [y1[i], y2[i]], [intensity1[i], intensity2[i]])
time.sleep(0.25)
play_glove
async def bhaptics_python.play_glove(
position: int,
motors: list[int],
playtimes: list[int],
shapes: list[int],
repeat_count: int
) -> int
TactGlove uniquement. Lit le retour haptique dans TactGlove. Contrairement à l'utilisation de play_dot, vous pouvez ajuster finement la Duration haptique et les changements d'Intensity de vibration. Cela permet une expression encore plus détaillée du retour haptique.
Chaque liste doit comporter huit éléments, et au moins un élément est nécessaire pour fonctionner.
Paramètres
-
position: Type d'appareil haptique pour la lecture. Utilisez uniquement8ou9.Valeur Appareil 8TactGlove(Left) 9TactGlove(Right) -
motors: Une liste composée de huit éléments, chacun représentant l'Intensity d'un moteur. La liste doit avoir une longueur de huit, car il y a huit moteurs dans un TactGlove. Plage valide pour chaque valeur de la liste : [0-100]Index de la liste Position du moteur 0Bout du pouce 1Bout de l'index 2Bout du majeur 3Bout de l'annulaire 4Bout du petit doigt 5Sur le poignet 6Sur la paume (côté pouce) 7Sur la paume (côté petit doigt) -
playtimes: Une liste composée de huit éléments, chacun représentant un intervalle de temps pour l'actionnement.Valeur Durée de lecture 15ms 210ms 420ms 630ms 840ms -
shapes: Une liste composée de huit éléments, chacun représentant la forme des changements d'Intensity haptique au fil du temps.Valeur Forme d'onde 0Intensity constante pendant toute la Duration 1Commence à l'Intensity spécifiée et diminue de moitié 2Commence à la moitié de l'Intensity spécifiée et augmente jusqu'à l'Intensity spécifiée. -
repeat_count: Nombre de répétitions.
Exemple
import bhaptics_python
import time
async def play_glove_example():
motors = [100] * 8
playtimes = [8] * 8
shapes = [2] * 8
# Left hand
for _ in range(3):
await bhaptics_python.play_glove(8, motors, playtimes, shapes, 0)
time.sleep(0.3)
# Right hand
for _ in range(3):
await bhaptics_python.play_glove(9, motors, playtimes, shapes, 0)
time.sleep(0.3)
Contrôle de la lecture
stop_by_request_id
async def bhaptics_python.stop_by_request_id(request_id: int)
Arrête la lecture haptique par ID de requête.
Paramètres
request_id: ID de requête retourné par la fonction de lecture haptique.
Exemple
import bhaptics_python
import asyncio
async def stop_by_id_example():
request_id = await bhaptics_python.play_event("shoot")
await asyncio.sleep(2)
await bhaptics_python.stop_by_request_id(request_id)
stop_by_event_name
async def bhaptics_python.stop_by_event_name(event_name: str)
Arrête toute lecture haptique pour un nom d'événement spécifique.
Paramètres
event_name: Nom de l'événement haptique que vous souhaitez arrêter.
Exemple
import bhaptics_python
import asyncio
async def stop_by_name_example():
await bhaptics_python.play_event("shoot")
await asyncio.sleep(2)
await bhaptics_python.stop_by_event_name("shoot")
stop_all
async def bhaptics_python.stop_all()
Arrête tous les retours haptiques en cours de lecture.
Cycle de vie
registry_and_initialize
async def bhaptics_python.registry_and_initialize(
app_id: str,
api_key: str,
default_config: str
) -> bool
Initialise l'environnement haptique. Cette fonction initialise le SDK et établit la connexion avec bHaptics Player. Elle doit être appelée avant d'utiliser les fonctions liées aux retours haptiques.
Paramètres
app_id: ID d'application créé dans bHaptics Developer Portal.api_key: Clé API créée dans bHaptics Developer Portal.default_config: Passez une chaîne vide ("").
Valeur de retour
Statut de réussite de l'initialisation.
Exemple
import bhaptics_python
import asyncio
async def main():
app_id = "your_app_id" # App ID created in bHaptics Developer Portal
api_key = "your_api_key" # API key created in bHaptics Developer Portal
# Initialize SDK
result = await bhaptics_python.registry_and_initialize(app_id, api_key, "")
print(f"Initialization result: {result}")
asyncio.run(main())
close
async def bhaptics_python.close()
Ferme la connexion du SDK.
Vérification de l'état
is_playing_event_by_request_id
async def bhaptics_python.is_playing_event_by_request_id(request_id: int) -> bool
Vérifie l'état de lecture d'un ID de requête spécifique. Fonctionne que la lecture soit basée sur des événements ou directe.
is_playing_event_by_event_id
async def bhaptics_python.is_playing_event_by_event_id(event_name: str) -> bool
Vérifie l'état de lecture d'un événement spécifique.
is_playing_event
async def bhaptics_python.is_playing_event() -> bool
Vérifie l'état global de la lecture haptique. Fonctionne que la lecture soit basée sur des événements ou directe.
is_bhaptics_device_connected
async def bhaptics_python.is_bhaptics_device_connected(position: int) -> bool
Vérifie l'état de connexion d'un appareil à une position spécifique.
Paramètres
position: Type d'appareil haptique à vérifier.Valeur Appareil 0TactSuit Pro 1TactSleeve(Left) 2TactSleeve(Right) 3TactVisor 4Tactosy for Hands(Left) 5Tactosy for Hands(Right) 6Tactosy for Feet(Left) 7Tactosy for Feet(Right) 8TactGlove(Left) 9TactGlove(Right)
Exemple
import bhaptics_python
# Check connection status for all positions
async def check_all_positions_example():
for i in range(10):
is_device_connected = await bhaptics_python.is_bhaptics_device_connected(i)
print(f"Position {i} device connection: {is_device_connected}")
Contrôle des appareils
Les fonctions de contrôle des appareils vous permettent de gérer et d'interagir directement avec les appareils haptiques connectés, par exemple en envoyant un ping, en définissant la force de vibration ou en échangeant les positions des appareils.
ping
async def bhaptics_python.ping(device_address: str)
Envoie un ping à un appareil spécifique.
Paramètres
device_address: L'adresse MAC de l'appareil haptique. Obtenez l'adresse en utilisantget_device_info_json.
Exemple
import bhaptics_python
import json
async def ping_first_device_example():
device_info_string = await bhaptics_python.get_device_info_json()
device_info_list = json.loads(device_info_string)
if len(device_info_list) > 0:
bhaptics_python.ping(device_info_list[0]['address'])
ping_all
async def bhaptics_python.ping_all()
Envoie un ping à tous les appareils connectés.
set_device_vsm
async def bhaptics_python.set_device_vsm(device_address: str, value: int)
Définit la valeur VSM (Vibration Strength Multiplier) pour un appareil.
Paramètres
device_address: L'adresse MAC de l'appareil haptique. Obtenez l'adresse en utilisantget_device_info_json.value: Valeur VSM (Vibration Strength Multiplier). Le VSM par défaut est100(x1.00 Feedback Intensity). Plage valide : [0-200]
Exemple
import bhaptics_python
import json
async def set_first_device_esm_example():
device_info_string = await bhaptics_python.get_device_info_json()
device_info_list = json.loads(device_info_string)
if len(device_info_list) > 0:
bhaptics_python.set_device_vsm(device_info_list[0]['address'], 100)
swap_position
async def bhaptics_python.swap_position(device_address: str)
Échange la position de l'appareil entre gauche et droite.
Les appareils pouvant échanger de position sont :
- Tactosy for Feet
- Tactosy for Hands
Paramètres
device_address: L'adresse MAC de l'appareil haptique. Obtenez l'adresse en utilisantget_device_info_json.
Exemple
import bhaptics_python
import json
async def swap_first_device_example():
device_info_string = await bhaptics_python.get_device_info_json()
device_info_list = json.loads(device_info_string)
if len(device_info_list) > 0:
# Swap the position of the first device
await bhaptics_python.swap_position(device_info_list[0]['address'])
Récupération d'informations
get_device_info_json
await bhaptics_python.get_device_info_json() -> str
Retourne les informations sur les appareils connectés au format JSON.
Valeur de retour
La chaîne contenant les informations sur les appareils au format JSON.
Voici un exemple de chaîne retournée lorsque deux appareils haptiques sont connectés dans un environnement.
[
{
"position": 0,
"deviceName": "TactSuitPro",
"address": "UNIQUE_ADDRESS_GOES_HERE",
"connected": true,
"paired": true,
"battery": 72,
"audioJackIn": false,
"vsm": 20
},
{
"position": 3,
"deviceName": "TactVisor",
"address": "UNIQUE_ADDRESS_GOES_HERE",
"connected": true,
"paired": true,
"battery": 85,
"audioJackIn": false,
"vsm": 20
}
]
Exemple
import bhaptics_python
import json
async def device_count_example():
device_info_string = await bhaptics_python.get_device_info_json()
device_info_list = json.loads(device_info_string)
print(f"Connected device count: {len(device_info_list)}")