Class UBhapticsSDK2
Inherits from UBlueprintFunctionLibrary
Class UBhapticsSDK2 contains the functions for using haptic devices from bHaptics.
References
| Module | BhapticsPlugin |
| Header | Engine\Plugins\Marketplace\BhapticsPlugin\Source\BhapticsPlugin\Public\BhapticsSDK2.h |
| Include | #include "BhapticsSDK2.h" |
Static Functions — Play Event-driven Haptic
Play the haptic patterns bound to specific haptic event made from Designer/Portal. We highly recommend to use these functions.
PlayHaptic
static int PlayHaptic(FString eventId);
Play the haptic event. It is the most basic way to call a haptic event. It has the lowest overhead of any haptic event-calling function.
Parameters
FString eventId: Name of haptic event which you want to play.
Returns
Request ID. You can use the request ID to stop the haptic. It returns -1 if the return fails.
However, when connected to the Hub, failed calls do not return -1 because the Hub does not provide a return value.
Example
#include "BhapticsSDK2.h"
void AExample::Shoot()
{
// Assuming the event name is "shootpistol"
UBhapticsSDK2::PlayHaptic("shootpistol");
}
PlayHapticWithOption
static int PlayHapticWithOption(FString eventId, float intensity = 1.0f, float duration = 1.0f, float angleX = 0.0f, float offsetY = 0.0f);
Play haptic event, with adjusting the strength, duration, and direction of the haptic.
Parameters
FString eventId: Name of haptic event which you want to play.float intensity: The haptic intensity is multiplied by this value.float duration: The haptic duration is multiplied by this value.float angleX: Rotate haptic counterclockwise around the globalVector3.up. Valid range is: [0.0f-360.0f]float offsetY: Move haptic up or down. Valid range is: [-0.5f-0.5f]
Returns
Request ID. You can use the request ID to stop the haptic. It returns -1 if the return fails.
However, when connected to the Hub, failed calls do not return -1 because the Hub does not provide a return value.
Example
#include "BhapticsSDK2.h"
void AExample::Shoot()
{
UBhapticsSDK2::PlayHapticWithOption(
"shootpistol", // Haptic name
1.0f, // Haptic intensity
1.0f, // Haptic duration
0.0f, // Rotate haptic around global Vector3.up (0f - 360f)
0.0f // Move haptic up or down (-0.5f - 0.5f)
);
}
PlayWithStartTime
static int PlayWithStartTime(FString eventId, int startMillis = 0, float intensity = 1.0f, float duration = 1.0f, float angleX = 0.0f, float offsetY = 0.0f);
Play haptic event, with adjusting the strength, duration, and direction of the haptic.
Parameters
FString eventId: Name of haptic event which you want to play.int startMillis: Playback start position in milliseconds. The firststartMillismilliseconds of the event are skipped (this is a start offset, not a delay before playback). The default is0. Windows/macOS/Android only.float intensity: The haptic intensity is multiplied by this value.float duration: The haptic duration is multiplied by this value.float angleX: Rotate haptic counterclockwise around the globalVector3.up. Valid range is: [0.0f-360.0f]float offsetY: Move haptic up or down. Valid range is: [-0.5f-0.5f]
Returns
Request ID. You can use the request ID to stop the haptic. It returns -1 if the return fails.
However, when connected to the Hub, failed calls do not return -1 because the Hub does not provide a return value.
Example
#include "BhapticsSDK2.h"
void AExample::Shoot()
{
UBhapticsSDK2::PlayWithStartTime(
"shootpistol", // Haptic name
0, // Playback start position (millisecond)
1.0f, // Haptic intensity
1.0f, // Haptic duration
0.0f, // Rotate haptic around global Vector3.up (0f - 360f)
0.0f // Move haptic up or down (-0.5f - 0.5f)
);
}
PlayLoop
static int PlayLoop(FString eventId, float intensity = 1.0f, float duration = 1.0f, float angleX = 0.0f, float offsetY = 0.0f, int interval = 200, int maxCount = 999999);
Play the haptic repeatedly. Additionally, like the function PlayHapticWithOption, you can adjust the strength, duration, and direction of the haptic.
Parameters
FString eventId: Name of haptic event which you want to play.float intensity: The haptic intensity is multiplied by this value.float duration: The haptic duration is multiplied by this value.float angleX: Rotate haptic counterclockwise around the globalVector3.up. Valid range is: [0.0f-360.0f]float offsetY: Move haptic up or down. Valid range is: [-0.5f-0.5f]int interval: The time interval between loops, measured in milliseconds.int maxCount: The number of loops.
Returns
Request ID. You can use the request ID to stop the haptic. It returns -1 if the return fails.
However, when connected to the Hub, failed calls do not return -1 because the Hub does not provide a return value.
Example
#include "BhapticsSDK2.h"
void AExample::Shoot()
{
UBhapticsSDK2::PlayLoop(
"shootpistol", // Haptic name
1.0f, // Haptic intensity
1.0f, // Haptic duration
0.0f, // Rotate haptic around global Vector3.up (0f - 360f)
0.0f, // Move haptic up or down (-0.5f - 0.5f)
200, // Loop interval time (millisecond)
999999 // Loop count
);
}
Static Functions — Play Haptic Directly
If you want to play haptics without creating a new event, use these functions.
PlayDot
static int PlayDot(int position, TArray<int> motorValues, float seconds = 0.5f);
Play haptic feedback on the specific haptic actuator. You can use this function without creating an event.
Parameters
int position: Type of haptic device. For more information, please refer here.Value Device Same as... Motors Count 0TactSuit Pro EBhapticsDevicePosition::Vest32 1TactSleeve(Left) EBhapticsDevicePosition::ForearmL3 2TactSleeve(Right) EBhapticsDevicePosition::ForearmR3 3TactVisor EBhapticsDevicePosition::Head4 4Tactosy for Hands(Left) EBhapticsDevicePosition::HandL3 5Tactosy for Hands(Right) EBhapticsDevicePosition::HandR3 6Tactosy for Feet(Left) EBhapticsDevicePosition::FootL3 7Tactosy for Feet(Right) EBhapticsDevicePosition::FootR3 8TactGlove(Left) EBhapticsDevicePosition::GloveL8 9TactGlove(Right) EBhapticsDevicePosition::GloveR8 TArray<int> motorValues: Assign the length of the array by the number of motors for device. Values in the array means motors' intensity. Valid range for each value in the array is: [0-100]float seconds: The duration of haptic, measured in second. Greater than or equal to0.1fis recommended.
Returns
Request ID. You can use the request ID to stop the haptic. It returns -1 if the return fails.
However, when connected to the Hub, failed calls do not return -1 because the Hub does not provide a return value.
Example
#include "BhapticsSDK2.h"
void AExample::Shoot()
{
// TactSuit Pro has 32 motors, so length of array should be 32 too.
TArray<int> MotorValueArray = TArray<int>{
50, 40, 30, 20, 10, 50, 40, 30,
50, 40, 30, 20, 10, 50, 40, 30,
50, 40, 30, 20, 10, 50, 40, 30,
50, 40, 30, 20, 10, 50, 40, 30};
UBhapticsSDK2::PlayDot(
(int)EBhapticsDevicePosition::Vest, // Device type
MotorValueArray, // Haptic intensities
0.5f // Haptic duration (second)
);
}
PlayPath
static int PlayPath(int position, TArray<float> x, TArray<float> y, TArray<int> motorValues, float seconds = 0.5);
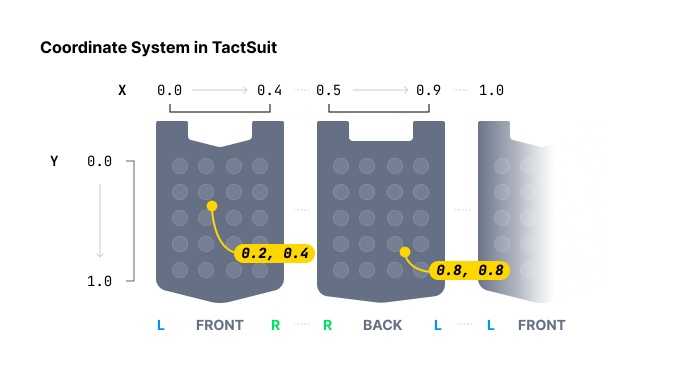
Play haptic around specific coordinates. Unlike PlayDot function, which specifies the haptic intensity for each haptic actuator individually, this method specify the haptic intensity for particular coordinates.
When specifying haptic position, PlayDot offers discrete control, while PlayPath is more continuous. PlayDot assigns intensity to individual actuators, whereas PlayPath assigns intensity for specific coordinates (between 0 and 1 for both X and Y axis), causing nearby actuators to vibrate accordingly.
You can put multiple coordinates with multiple intensities in the array. Note that all actuators around these coordinates in the array will activate simultaneously (at the same time), not sequentially. Moreover, the size of all arrays must be the same.
By continuously calling this function while gradually changing the values, you can achieve the effect of a moving haptic point.
[TactGlove DK3] PlayPath does not drive the wrist voice-coil motor (VCM) on a DK3 glove.
Parameters
int position: Type of haptic device.Value Device Same as... 0TactSuit Pro EBhapticsDevicePosition::Vest1TactSleeve(Left) EBhapticsDevicePosition::ForearmL2TactSleeve(Right) EBhapticsDevicePosition::ForearmR3TactVisor EBhapticsDevicePosition::Head4Tactosy for Hands(Left) EBhapticsDevicePosition::HandL5Tactosy for Hands(Right) EBhapticsDevicePosition::HandR6Tactosy for Feet(Left) EBhapticsDevicePosition::FootL7Tactosy for Feet(Right) EBhapticsDevicePosition::FootR8TactGlove(Left) EBhapticsDevicePosition::GloveL9TactGlove(Right) EBhapticsDevicePosition::GloveRTArray<float> x: Assign X coordinate. Valid range for each value in the array is: [0.0f-1.0f]TArray<float> y: Assign Y coordinate. Valid range for each value in the array is: [0.0f-1.0f]TArray<int> motorValues: Assign the length of the array by the number of coordinate. Values in the array means coordinates' intensity. Valid range for each value in the array is: [0-100]float seconds: The duration of haptic, measured in second. Greater than or equal to0.1fis recommended.
Returns
Request ID. You can use the request ID to stop the haptic. It returns -1 if the return fails.
However, when connected to the Hub, failed calls do not return -1 because the Hub does not provide a return value.
Example
#include "BhapticsSDK2.h"
/* Assumption:
- For TactSuit Pro
- Coordinate with Intensity
- (X: 0.1, Y: 0.2) Intensity 40
- (X: 0.3, Y: 0.4) Intensity 80
- (X: 0.5, Y: 0.6) Intensity 10
- Duration 0.5 second
*/
void AExample::Shoot()
{
UBhapticsSDK2::PlayPath(
(int)EBhapticsDevicePosition::Vest, // Device Type
TArray<float>{0.1f, 0.3f, 0.5f}, // X Coordinates
TArray<float>{0.2f, 0.4f, 0.6f}, // Y Coordinates
TArray<int>{40, 80, 10}, // Intensities
0.5f // Duration
);
}
PlayWaveform
static int PlayWaveform(int position, TArray<int> motorIntensities, TArray<EBhapticsGlovePlayTime> playTimeValues, TArray<EBhapticsGloveShapeValue> shapeValues, int frequency = 80, int repeatCount = 0);
TactGlove Only. Play haptics in TactGlove. Unlike using PlayDot, you can finely adjust haptic duration and vibration intensity changes. This allows for even finer expression of haptic feedback.
Each array (motorIntensities, playTimeValues, shapeValues) must have six elements for TactGlove DK2 or eight elements for TactGlove DK3, and all three arrays must have the same length. Any other length returns -1.
Parameters
-
int position: Type of haptic device.Value Device Same as… 8TactGlove(Left) EBhapticsDevicePosition::GloveL9TactGlove(Right) EBhapticsDevicePosition::GloveR -
TArray<int> motorIntensities: An array representing the intensity of each motor. Its length must match the number of motors in the TactGlove: six (TactGlove DK2) or eight (TactGlove DK3). The palm motors at array indices6and7(in the table below) exist on DK3 only. Valid range for each value in the array is: [0-100]Array Index Motor is positioned at… 0Tip of the thumb 1Tip of the index finger 2Tip of the middle finger 3Tip of the ring finger 4Tip of the little finger 5On the wrist 6On the palm (thumb side) 7On the palm (little finger side) -
TArray<EBhapticsGlovePlayTime> playTimeValues: An array with the same length asmotorIntensities(six for DK2, eight for DK3), each representing a time interval for actuation, with time defined usingEBhapticsGlovePlayTimeenums.Value Duration Same as… EBhapticsGlovePlayTime::NoneNone 0EBhapticsGlovePlayTime::FiveMS5ms 1EBhapticsGlovePlayTime::TenMS10ms 2EBhapticsGlovePlayTime::TwentyMS20ms 4EBhapticsGlovePlayTime::ThirtyMS30ms 6EBhapticsGlovePlayTime::FortyMS40ms 8 -
TArray<EBhapticsGloveShapeValue> shapeValues: An array with the same length asmotorIntensities(six for DK2, eight for DK3), each representing the forms of haptic intensity changes over time, specified by theEBhapticsGloveShapeValueenums.Value Waveform Same as… EBhapticsGloveShapeValue::ConstantConstant intensity for the duration 0EBhapticsGloveShapeValue::DecreasingStarts at the specified intensity and decreases by half 1EBhapticsGloveShapeValue::IncreasingStarts at half of the specified intensity and increases to the specified one. 2[TactGlove DK3] On the DK3 glove, the wrist actuator (array index
5) is a voice-coil motor (VCM) and does not reflectshapeValues. The other seven motors apply the waveform shape the same as on DK2 gloves. -
int frequency: [TactGlove DK3 only] Vibration frequency in Hz of the DK3 glove's own actuators. The default is80. This affects only the DK3 glove itself and does not change the operating frequency of any other connected device. It has no effect on DK2 gloves or on the universal (non-Windows/macOS) path. Windows/macOS only. -
int repeatCount: Number of times to repeat the waveform, from1.0plays it once. Windows/macOS only.
Returns
Request ID. You can use the request ID to stop the haptic. It returns -1 if the return fails.
However, when connected to the Hub, failed calls do not return -1 because the Hub does not provide a return value.
Example
#include "BhapticsSDK2.h"
void AExample::Shoot()
{
TArray<int> GloveMotorValue = TArray<int>{50, 50, 50, 50, 50, 50, 50, 50};
TArray<EBhapticsGlovePlayTime> GlovePlayTime = {
EBhapticsGlovePlayTime::FiveMS, EBhapticsGlovePlayTime::TenMS,
EBhapticsGlovePlayTime::TwentyMS, EBhapticsGlovePlayTime::ThirtyMS,
EBhapticsGlovePlayTime::FortyMS, EBhapticsGlovePlayTime::None,
EBhapticsGlovePlayTime::None, EBhapticsGlovePlayTime::None};
TArray<EBhapticsGloveShapeValue> GloveShapeValue = {
EBhapticsGloveShapeValue::Constant, EBhapticsGloveShapeValue::Decreasing,
EBhapticsGloveShapeValue::Increasing, EBhapticsGloveShapeValue::Constant,
EBhapticsGloveShapeValue::Decreasing, EBhapticsGloveShapeValue::Increasing,
EBhapticsGloveShapeValue::Constant, EBhapticsGloveShapeValue::Constant};
UBhapticsSDK2::PlayWaveform(
(int)EBhapticsDevicePosition::GloveL, // Device Type
GloveMotorValue, // Intensities
GlovePlayTime, // Intervals
GloveShapeValue // Intensity changing forms
);
}
Static Functions — Others
StopHapticByEventId
static bool StopHapticByEventId(FString eventId);
Stop the haptic event by Event ID. Returns whether the stop was successful.
#include "BhapticsSDK2.h"
void AExample::Example()
{
UBhapticsSDK2::StopHapticByEventId("eventID");
}
StopHapticByRequestId
static bool StopHapticByRequestId(int requestId);
Stop the Haptic Event by using the Request ID from the return of the function that executes the haptic. Returns whether the stop was successful.
#include "BhapticsSDK2.h"
void AExample::Example()
{
int RequestID = UBhapticsSDK2::PlayHaptic("eventID");
UBhapticsSDK2::StopHapticByRequestId(RequestID);
}
StopHaptic
static bool StopHaptic();
Stops all haptic currently playing. Returns whether the stop was successful.
#include "BhapticsSDK2.h"
void AExample::Example()
{
UBhapticsSDK2::PlayHaptic("bangbang");
UBhapticsSDK2::PlayHaptic("eventID");
UBhapticsSDK2::PlayHaptic("explosion");
UBhapticsSDK2::StopHaptic();
}
PauseHapticByEventId
static void PauseHapticByEventId(FString eventId);
Pause the haptic event by Event ID. The playback position is held so it can be continued later with ResumeHapticByEventId.
#include "BhapticsSDK2.h"
void AExample::Example()
{
UBhapticsSDK2::PauseHapticByEventId("eventID");
}
ResumeHapticByEventId
static void ResumeHapticByEventId(FString eventId);
Resume a haptic event previously paused with PauseHapticByEventId, continuing from the position where it was paused.
#include "BhapticsSDK2.h"
void AExample::Example()
{
UBhapticsSDK2::ResumeHapticByEventId("eventID");
}
IsPlaying
static bool IsPlaying();
Check if the haptic is playing.
#include "BhapticsSDK2.h"
void AExample::Example()
{
if (UBhapticsSDK2::IsPlaying())
{
StopHaptic();
}
}
IsPlayingByEventId
static bool IsPlayingByEventId(FString eventId);
Check if the haptic event for this Event ID is playing.
#include "BhapticsSDK2.h"
void AExample::Example()
{
UBhapticsSDK2::PlayHaptic("eventID");
if (UBhapticsSDK2::IsPlayingByEventId("eventID"))
{
UBhapticsSDK2::StopHapticByEventId("eventID");
}
}
IsPlayingByRequestId
static bool IsPlayingByRequestId(int requestId);
Check if the haptic event for this Request ID is playing.
#include "BhapticsSDK2.h"
void AExample::Example()
{
int RequestID = UBhapticsSDK2::PlayHaptic("eventID");
if (UBhapticsSDK2::IsPlayingByRequestId(RequestID))
{
UBhapticsSDK2::StopHapticByRequestId(RequestID);
}
}
Initialize
static void Initialize();
Initialize the haptic environment. This function should be called before using the haptic-related functions.
Ping
static void Ping(FBhapticsDevice device);
Send simple haptic feedback to certain device.
PingAll
static void PingAll();
Send simple haptic feedback to all connected devices.
Destroy
static void Destroy();
Destroy the haptic environment. This function must be called when game ends, and called ONLY ONCE.
GetBhapticsDevices
static TArray<FBhapticsDevice> GetBhapticsDevices();
Get an array of connected haptic devices' info.
IsBhapticsAvailable
static bool IsBhapticsAvailable();
Check if the haptic environment is initialized, and ready to use haptic-related functions.
ProjectToVest
static FBhapticsRotationOption ProjectToVest(
FVector ContactLocation,
UPrimitiveComponent* PlayerComponent,
float HalfHeight = 0
);
Helper function to compute the offset values (angle and height) of a given collision contact point from the player. These offset values can be used in PlayHapticWithOption and PlayLoop which can adjust the haptic position.
This function assumes that the forward direction aligns with the front of the vest, and the player's position is considered as the origin.
Check out the example below for detailed information.
Parameters
FVector ContactLocation: Contact point in global coordinates.UPrimitiveComponent* PlayerComponent: Reference to the primitive component attached to the player.float HalfHeight: The half value of the player's actual height, measured in centimeter.
Example
Let's assume implementing haptic when getting shot in a VR game. The corresponding haptic pattern for this event would be a short and strong haptic feedback at the center front of the TactSuit. To enhance realism, varying the height and angle of the haptic feedback based on where the player is shot would be ideal.
The PlayHapticWithOption and PlayLoop functions allow for adjusting the height and angle of the haptic pattern. These functions take angle(OffsetAngleX) and height(OffsetY) values for haptic adjustment.
The ProjectToVest function calculates the angle and height values based on where the player is shot, the player's transform information, and the user's height. These values are then encapsulated in the FBhapticsRotationOption structure and returned.
-08a69024da438d538cc3301a1ecab27f.png)
#include "BhapticsSDK2.h"
void AExample::HitByBullet()
{
APawn *PlayerPawn = UGameplayStatics::GetPlayerPawn(GetWorld(), 0);
UPrimitiveComponent *PlayerComponent = Cast<UPrimitiveComponent>(PlayerPawn->GetRootComponent());
FVector ContactLocation = USomewhere::GetContactLocationSomehow();
float HalfHeight = YourActualHeight / 2;
FBhapticsRotationOption result = UBhapticsSDK2::ProjectToVest(ContactLocation, PlayerComponent, HalfHeight);
UBhapticsSDK2::PlayHapticWithOption("hit_by_bullet", 1.0f, 1.0f, result.OffsetAngleX, result.OffsetY);
}
ProjectToVestLocation
static FBhapticsRotationOption ProjectToVestLocation(FVector ContactLocation, FVector PlayerLocation, FRotator PlayerRotation);
Helper function to compute offset values from a contact location and player transform information. It's similar to ProjectToVest, but it only calculates the angle offset(OffsetAngleX). The height(OffsetY) will always be 0.
Parameters
FVector ContactLocation: Contact point in global coordinates.FVector PlayerLocation: Location of the player.FRotator PlayerRotation: Rotation of the player.
CustomProjectToVest
static FBhapticsRotationOption CustomProjectToVest(FVector ContactLocation, UPrimitiveComponent* PlayerComponent, float HalfHeight = 0, FVector UpVector = FVector::ZeroVector, FVector ForwardVector = FVector::ZeroVector);
Helper function to compute offset values from collision. Performs the same function as ProjectToVest, but allows the Forward and Up vectors to be changed.
FVector ContactLocation: Contact point in global coordinates.UPrimitiveComponent* PlayerComponent: Reference to the primitive component attached to the player.float HalfHeight: The half value of the player's actual height, measured in centimeter.FVector UpVector: The reference upward direction vector for offset calculation.FVector ForwardVector: The reference forward direction vector for offset calculation.